人間は優秀なセンサや判断機構を持つ一方で時に信じられないほど幼稚なミスを犯してしまいます。そしてそれは自動車の運転時に取り返しのつかない結果をもたらします。2021年における日本の交通事故死亡者数は2,636人で負傷者数は361,768人に登りました。このような被害を減らすため、完全自動運転の実現に向け様々な企業・研究機関が世界中で研究と実証実験を行っています。数年以内にはこの記事を読んでいる皆さんも試乗車に乗る機会があるのではないでしょうか。
近年自動運転技術が急速に進化したのは認識AIの発展に加え、3Dセンサの高精度化も大きな貢献を果たしています。現行のLevel 4自動運転にはリアルタイムで高精度な3Dデータを得るLiDAR(Light Detection and Ranging)センサが大きな役割を果たしています。LiDARセンサは自動運転車がどの車線にいるか判定する自己位置推定に加え、周囲の車・歩行者を検出する物体検出といった自動運転の中核的機能に使用されています。
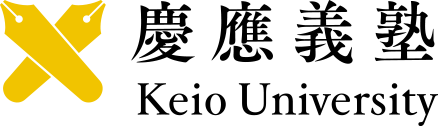
一方でLiDARを始めとしたセンサの脆弱性を突きハッキング(攻撃)することで虚偽データを注入するセンサ幻惑(sensor spoofing)攻撃が実証され、自動運転の重大な脅威となっています。この攻撃を悪用すると例えば自動運転車の目の前に壁が現れたかのように誤認識させることで急ブレーキを誘発し、搭乗者や後続車に被害を与えることが可能です。このような事故が起きてしまうと自動運転技術への信頼が根本から失われてしまうため、吉岡研究室ではこういったセンサ攻撃を防ぐためにセンサセキュリティ研究を行っています。例えばLiDARの新たな脆弱性の発見やハッキングを防ぐセンサ構造などを提案することで、安心安全な自動運転車の実現を目指しています。
センサセキュリティ研究はLiDARセンサと自動運転制御、そしてAIに渡る広範囲の分野を横断しなくてはならないため、一筋縄ではいきません。しかし大学生・大学院生ならではの柔軟な発想が活かせる上、センサとソフトウェア広範囲に渡る実践経験が得られます。特にLiDARセンサセキュリティは確固たる防御手法が確立されていないため、頑張り次第で大きな社会的インパクトを残せるフロンティア性溢れる分野です。
センサ幻惑によって任意座標に虚偽データを注入し、自動運転車を騙すことが可能。
Hallyburton et al, “Security Analysis of Camera-LiDAR Fusion Against Black-Box Attacks on Autonomous Vehicles“, USENIX Security 2022.