学問は細分化に細分化を重ね、それぞれの分野においてより深く発展してきました。今後も学問の各分野において、専門性はますます尖り、伸びていくことが予想されますが、一方で、世の中の問題は複雑化、複合化している状況となっています。例えば、新型コロナウィルス感染症の対策を見ても、「医療」×「経済」の方程式をバランス良く解く必要がありました。今後の超高齢社会における人間支援の充実化や、地球環境、エネルギー問題など、一つの専門性のみでは解決が困難な問題が多くあることは皆さんも良くお分かりのことと思います。
システムデザイン工学はさまざまな学問を複合、統合して新しい解を探索する学問です。特に対象とする自然現象と他の現象の共通点を見つけ(アナロジー)、それらを纏めて説明できる本質・原理を明らかにすることがシステムデザイン工学の方法論です。
一つ具体的な例を挙げましょう。高校生の物理でも習う電圧源の回路方程式において、電流は抵抗やキャパシタ、インダクタンスにより決まります。また、物体の運動を表す運動方程式において、印加する力に対応する速度は、粘性抵抗、バネ、質量によって決まります。この2つの現象は電気と機械で異なりますが、実はシステムとして捉えると同じ構造のシステムとして扱うことができます。また、回路の共振はインダクタンスとキャパシタの組み合わせで発生しますが、機械系においても質量とバネの組み合わせにより振動が発生することからも理解ができるでしょう。
研究室の成果の中でこれを直接利用した例もあります。機械系の振動を抑制することは産業用ロボットや生産システムの精密位置決めで特に重要な課題になっています。このような機械は共振周波数を持ち、質点とバネの組み合わせでモデル化することができます。生産効率を上げるために機械を高速に動かそうとすると、一つの共振周波数のみならず、より高い共振周波数も考慮しなければなりません。質点とバネのペアをもう一組連結すれば、より高次の共振も考慮することはできますが、振動を止めるための制御を導入しようとすると、多くの微分演算が必要になるため、実装が困難でした。研究室の学生のアイディアで、質点とバネの組み合わせを無限に増やしたモデルを作成したところ、微分演算が不要で、かつ理論的に無限の共振も抑制できることが分かったのです。これは波動方程式と言って、電磁波、音や流体など、多くの波動現象を記述する方程式であり、抽象化された視野により解決できた問題の一つです。
また、ロボットにより人間の運動を再現させる試みにも応用してきました。人間の運動の再現は、空間を移動させるための速度と対象へ加える力のそれぞれの情報を抽出し、ロボットで再現させることが必要になります。速度の制御と力の制御は、「双対性」という相反する性質を持っています。このことは、電気回路の「電圧源」と「電流源」の持つ性質と同じです。双対性を有する物理量同士は掛けるとパワー(動力、電力)となり、割るとインピーダンスとなります。さらに、加速度に注目することで、速度と力の両者を統合し、同時に再現することができるようになります。この考え方を図に示す書道ロボットに導入し、書の達人の揮毫のロボットによる再現に成功しました。
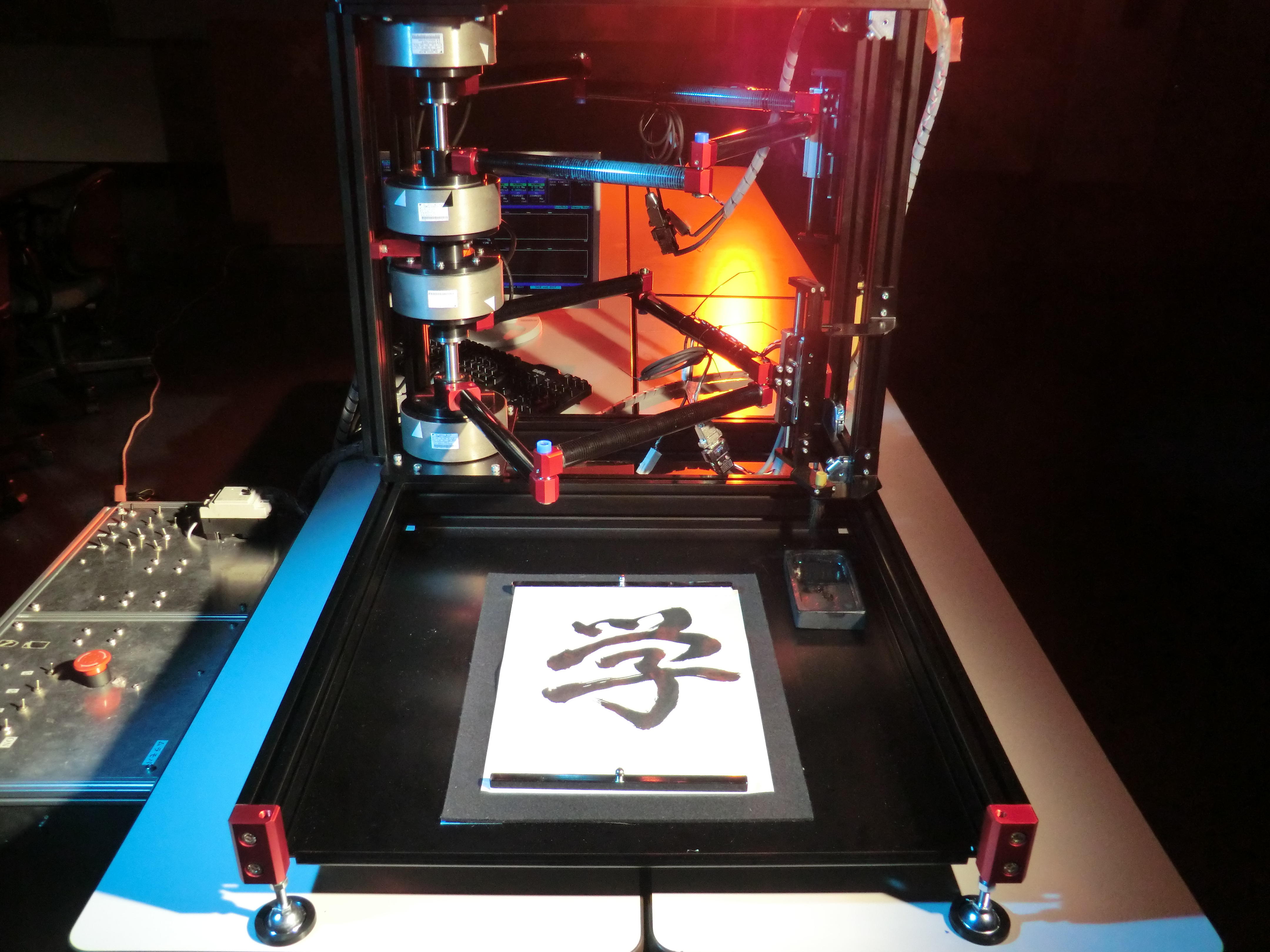
図1 開発した書道ロボット

図2 人間による保存動作

図3 ロボットによる再現
このように、これまでに困難とされてきた課題に対して、抽象化を行うアプローチにより、シンプルかつ強力な解につながることが伝わったのではないかと思います。これがシステムデザイン工学に基づく抽象化のすゝめです。皆さんが夢のある未来社会を切り拓き、深い専門性と俯瞰した視野を併せ持つ次世代のリーダーとして活躍することを期待しています。