人間が作ったアクチュエータで筋肉を超えるものはないと言って良いでしょう。例えば、ヒトは筋肉を収縮させて米粒に文字を書く繊細な動作から、200 kgのバーベルを持ち上げることまでできます。シロナガスクジラは筋肉を動かして体重190,000 kgの巨体で大海を泳ぎ、蚊は体重2 mgの中に筋肉を備え、それを動かして飛びます。これだけスケールが違うと、人間が作る1種類のアクチュエータでは対応できません。
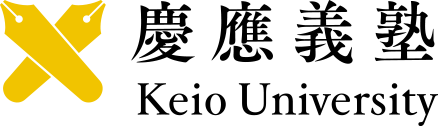
筋肉は、力を発生するだけではなく、バネとダッシュポット(摩擦のように速度に比例する抵抗力を発生するもの)の性質を持っています(図1)。筋肉がバネとダッシュポットの性質を持っているので、例えば高所から飛び降りたときに、膝や腰を曲げて筋肉で衝撃を吸収するように柔らかに着地できます。ヒトは、筋肉のバネとダッシュポットの性質をダイナミックに変えているはずですが、その性質は、指、手や足を計測器に固定した状態でしか計ることができませんでした。
計測器に固定しないで、ヒトらしい様々な運動を行っているときの筋肉の性質を知るにはどうすればよいでしょうか。私たちは、歩いているときや、自転車を漕いでいるとき(図2)に、筋電(筋肉の活動度)を計るとともに、筋肉に電気刺激を加えて、筋音(筋肉が収縮するときの振動)、関節角度、力やトルクを計測しました。歩いたり、自転車を漕いだりしていますから、それによる振動(図3a)や力も計測されます。これらを取り除きます。そうすると、電気刺激によって誘発された筋音だけを取り出すことができます(図3b)。ここまでできれば、入力と出力が分かっていますから、中身、つまりバネとダッシュポットの性質を知ることができます。
例えば、自転車を漕ぐときに、ペダルは軽いけれども速く漕ぐときと、ペダルは重いけれどもゆっくり漕ぐときとでは(パワーは等しいとします)、筋肉の性質はどう変わるでしょうか。太腿の筋肉のバネの性質を調べると、ペダルの回転速度が高くなるほどバネが硬くなりました。一方、筋電は、ペダル1回転の平均値では変化しませんでした。つまり、筋肉の活動度は変化しないけれども、回転速度が高くなるにつれて、遅筋線維に代わって速筋線維が活動すると考えられます。
さて、ヒトが直立姿勢を維持するときにも、筋肉が発生する力とバネの性質を上手く組み合わせているはずですが、その制御方法は分かっていません。制御方法を考えるときには、対象について詳細なモデルが必要です。現在、直立姿勢を維持しているときの重心の動揺と筋肉の性質の関係を調べています。ヒールの高い靴を履いて足首の関節の自由を奪われたら、目を閉じて視覚の情報を使えなかったら、など興味は尽きません。
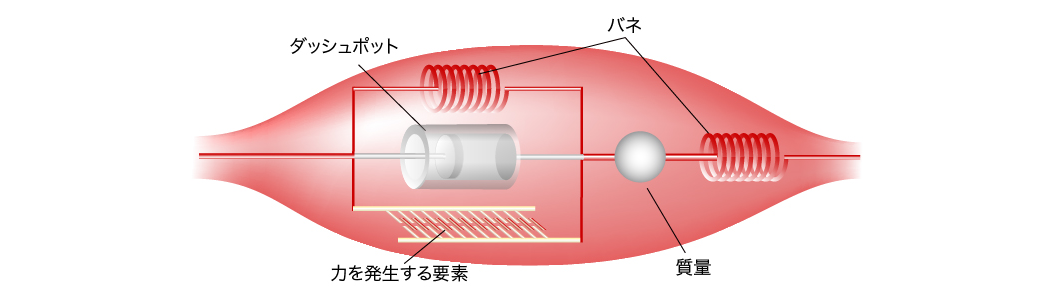
図1 筋肉の力学モデルの1 つ 力を発生する要素にバネとダッシュポットが並列に接続されており、それに直列に接続したバネと質量を仮定するモデル

図2 自転車漕ぎ運動 サイクルエルゴメータで負荷や回転数を様々に変えて計測する
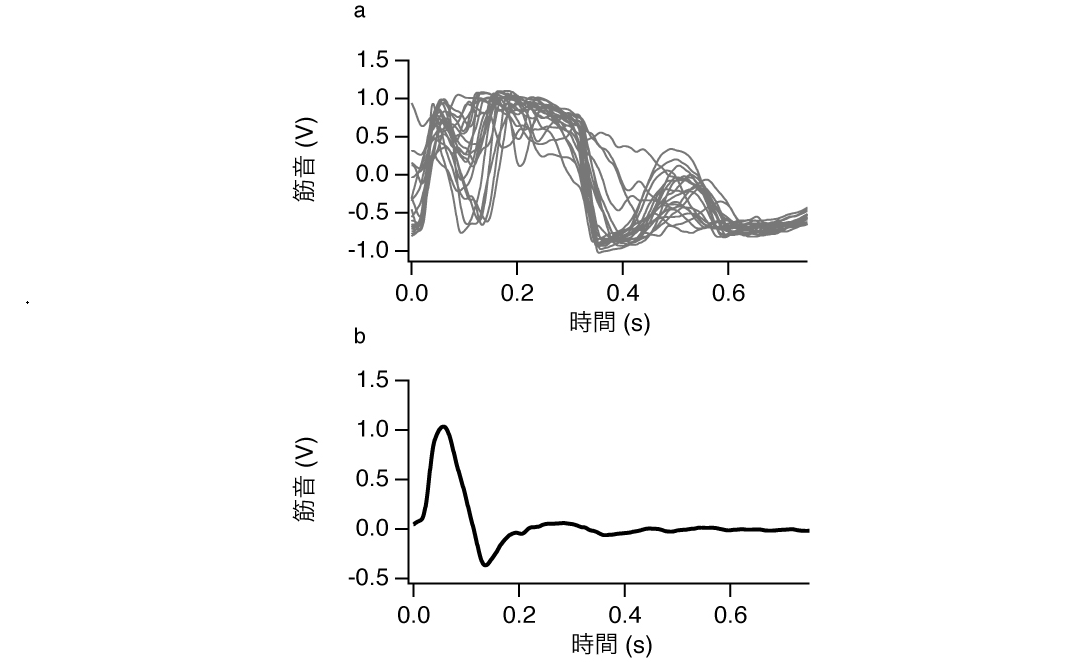
図3 筋音の計測例 a: 自転車漕ぎによる振動に、漕ぐために筋肉が収縮することによる筋音と電気刺激によって誘発された筋音が重なった信号(20回の計測値の重ね描き) b: 電気刺激によって誘発された筋音