現代社会においては、ありとあらゆるシステムにセンサやアクチュエータ及びそれらを制御するマイクロプロセッサ等の電子機器が組み込まれ、それらの多くは相互にネットワークに接続されて、全体としてシステムを構成しています。もはや現代社会自体が各種システムの大規模な集合体だと言っても過言ではありません。具体的には、制御対象(ロボット、自動車、製造装置、工場、ビル、街、自然環境、人等)に多くのセンサを取り付けて、それらのセンサを用いて対象をモニタリング・制御すると同時に、それらのセンサデータや制御データをクラウド等に収集し、さらには収集されたデータを解析して最適に制御するという流れができつつあります。最近ではこれらのビッグデータ解析には人工知能(AI)、特に深層学習(ディープラーニング)が用いられており、脚光を浴びています。
一方で機器を実際に制御する側は組込みとかエッジコンピューティングと呼ばれ、アクチュエータ等の制御を行う場合にはリアルタイムに高精度に処理すること、またその多くはバッテリで駆動されるので低消費電力あること等が望まれています。つまりは単純に演算や通信を行うだけではなく、演算や通信の品質(QoS: Quality of Service)やそれらのトレードオフを制御することが要求されています。さらに多くの場合には機器に組込むために小型であることも望まれています。
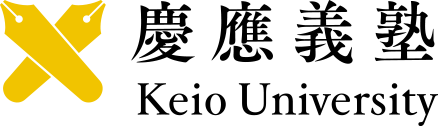
我々は、この組込み分野のインフラ側に着目して研究開発を続けています。具体的には、ハードウェアとしてはQoSを実現するマイクロプロセッサ(CPU)やネットワークの研究開発を行っています。リアルタイム処理用のマイクロプロセッサとしては、スレッド(プログラム)に優先度を付けて同時実行することで、リアルタイム処理をスケジューリング理論通りにオーバヘッドなく実現するRMT PU (Responsive Multithreaded Processing Unit) の研究開発を行っています。同様にリアルタイム通信としては、パケットに優先度を付けてノード毎に追い越すことによって、リアルタイムスケジューリング理論をそのまま通信にも応用可能なリアルタイム通信リンク (Responsive Link) の研究開発を行っています。Responsive LinkはISO/IEC 24740として国際標準規格として採用されています。さらには、それらのリアルタイム処理用CPU (RMT PU) やリアルタイムネットワーク (Responsive Link) 、センサやアクチュエータを制御するためのインタフェース(I/O)、メモリ等を一つのVLSIとして実現するSoC (System-on-Chip) の研究開発を行っています。例えば、図1のResponsive Multithreaded Processor (RMTP) は10mm角のVLSIにこれらの機能を全て集積しています。
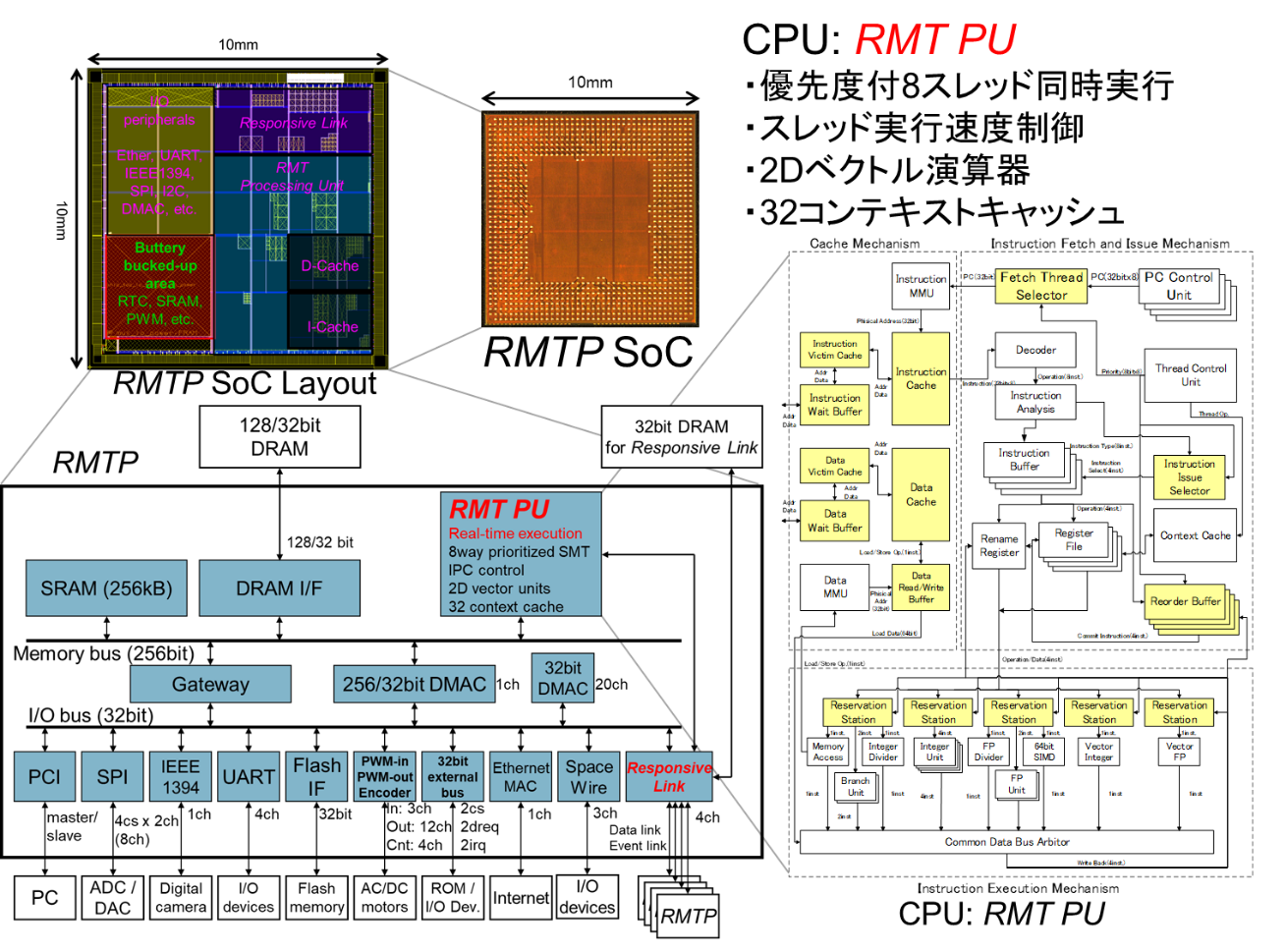
図 1 Responsive Multithreaded Processor (RMTP)
さらには、SoCに集積しきれない主記憶(DRAM)や永続記憶(フラッシュメモリ)、電源IC、各種センサ、コネクタ等を超高密度に集積した基板であるSiP (System-in-Package)の研究開発も行っています。例えば、図2のRMTP SiPは、PCのほぼすべての機能+リアルタイム処理機能+リアルタイム通信機能+各種I/Oインタフェースを20mm角に集積しています。
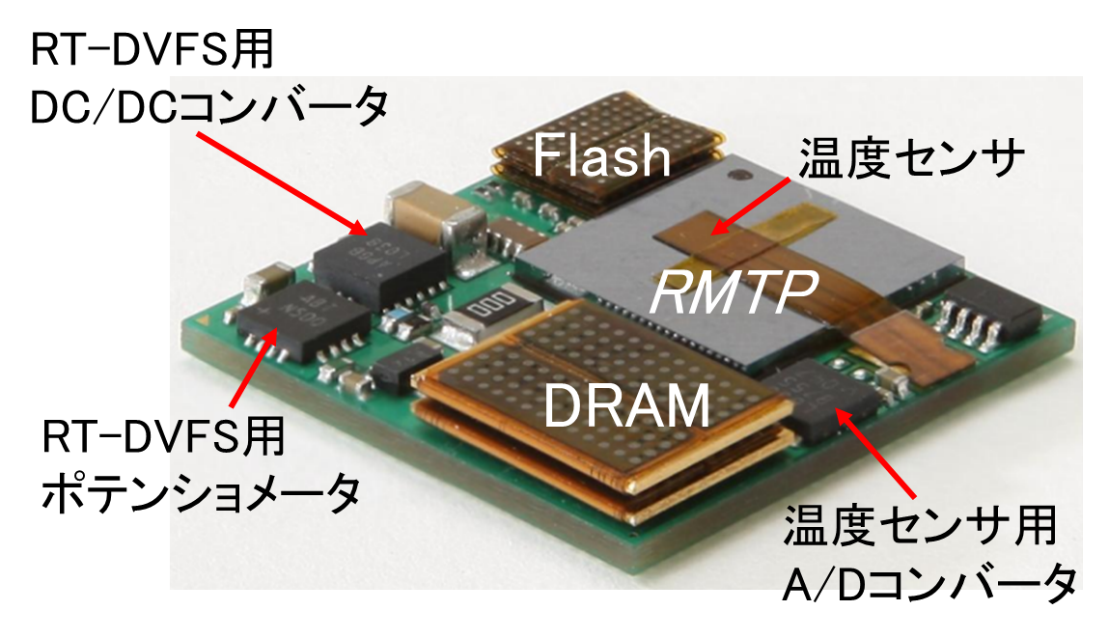
図 2 20mm角RMTP SiP
ここで、リアルタイム性というのは、速いとかすぐにという意味はありません。何らかの時間制約(デッドラインや周期等)がある処理をリアルタイム処理、同様に時間制約のある通信をリアルタイム通信と言います。我々は、リアルタイム性を実現するために、リアルタイム処理や通信に関する理論やアルゴリズムに関する研究を行うだけでなく、それらの理論に基づいた演算処理や通信のハードウェアアーキテクチャ、アルゴリズムに基づいたソフトウェアアーキテクチャ、スケジューラ、オペレーティングシステム等の研究開発を行っています。理論のみでもなく、ハードウェアのみでもなく、ソフトウェアのみでもなく、それら全てを同時に補完的に研究開発することによって、より実用的で高機能な実システムを構築できると考えています。そして、それらの研究成果をロボットや宇宙機等のハイエンドな組込みリアルタイムシステムに応用しています。図3は宇宙機の分散制御の例ですが、各センサやアクチュエータにそれらを制御するコントローラ(RMTP SoC/SiP)が組み込まれ、互いにリアルタイムネットワーク (Responsive Link) で接続され通信をしながら分散制御することで、システム全体が制御されます。さらに、これらの実システムから得られたデータを元にして、次世代の新たな理論やアーキテクチャの考案を行っています。これらが実現すると、様々なシステムを高品位に制御することが可能となります。
図 3 宇宙機の分散制御の例