- Home
- New Kyurizukai
- Model Base Control
from Keio's Faculty of Science and Technology
Model Base Control
from Keio's Faculty of Science and Technology
Model base control system
designs useful for people and society
I’d like to interact with society through dynamics and control technology.
Using the model base control technology and by digging up latent needs of people, Mr. Masaki Takahashi pursues the creation of products and systems truly needed by people and society. In his students’ ages, sports were the focus of his enthusiasm. He confesses that, though he was good at mathematics and physics, he was skeptical about why he was learning these subjects. But a lecture he received at the university class awakened his interest in dynamics and control technology, which brought him into a life of scientific research day and night. But his style of research pursuit has been inseparable from interaction with people and society. In fact, his sphere of activity extends far beyond his laboratory, with his eyes always directed toward the outside society.
Masaki Takahashi
With control engineering and intelligent control engineering as his specialties, Mr. Takahashi uses model base control technology to address research themes relating to mechanical control, intelligent robotics and space engineering, among others. He obtained a doctor’s degree at Keio University Graduate School of Science and Technology in 2004. He became a postdoctoral research fellow at Keio University in 2004, a research associate at Keio’s Faculty of Science and Technology in 2005, an assistant professor in 2007, and the current position as an associate professor in 2009.
Introducing Researchers
Associate Professor Masaki Takahashi tackles the effective use of model base control technology to develop systems design that benefits people and society at large.
Making the Most of High-Precision Control Technology to Design Systems Useful for People and Society
Model base control technology meets the needs of people and society
Automobiles as a convenient means to transport people and cargo, highrise condominiums providing ample residential space in the center of metropolitan areas . . . the development of technology has benefited people’s lifestyles and prosperity of society in modern times. But when we look at such amenities brought by technological advances from a human viewpoint, there are still people who suffer from carsickness and high-rise buildings that shake due to earthquakes or strong winds, causing us discomfort. A new attempt is now being made to take a new look at the relationship between technology and humans from the perspective of “Safety and Comfort for Humans.” In this issue, we listened to Associate Professor Masaki Takahashi who is contributing to the development of model base control systems to create products and systems useful for people and society.
Realizing a better relationship between people, society and machines
“Model Base Control” is a method to realize effective control by modeling a target system and developing an optimal control technology for the target. An advantage of this method is that it allows you to develop a desired control technology while conducting simulations. On the other hand, there are cases where the system developed cannot work as simulated if the model precision is poor or the simulated operating environment differs significantly from reality. This makes it important to develop highly accurate modeling as well as to design a control system that can properly respond to changes in the environment and modeling errors.
“Modeling including that of the operating environment is indispensable to perform highly precise model base control. Of various factors involved, the most difficult is to assume users. Modeling of users is difficult because we humans conduct ourselves based on our own judgment. But modeling including that of users is inevitable to create systems that can be practically used in actual society,” remarks Associate Professor Takahashi.
As research themes, Dr. Takahashi has chosen robotics, automobiles and buildings – realms that have much to do with people and society. This is because by making use of model base control he aims to contribute to the development of products and systems useful for people and society.
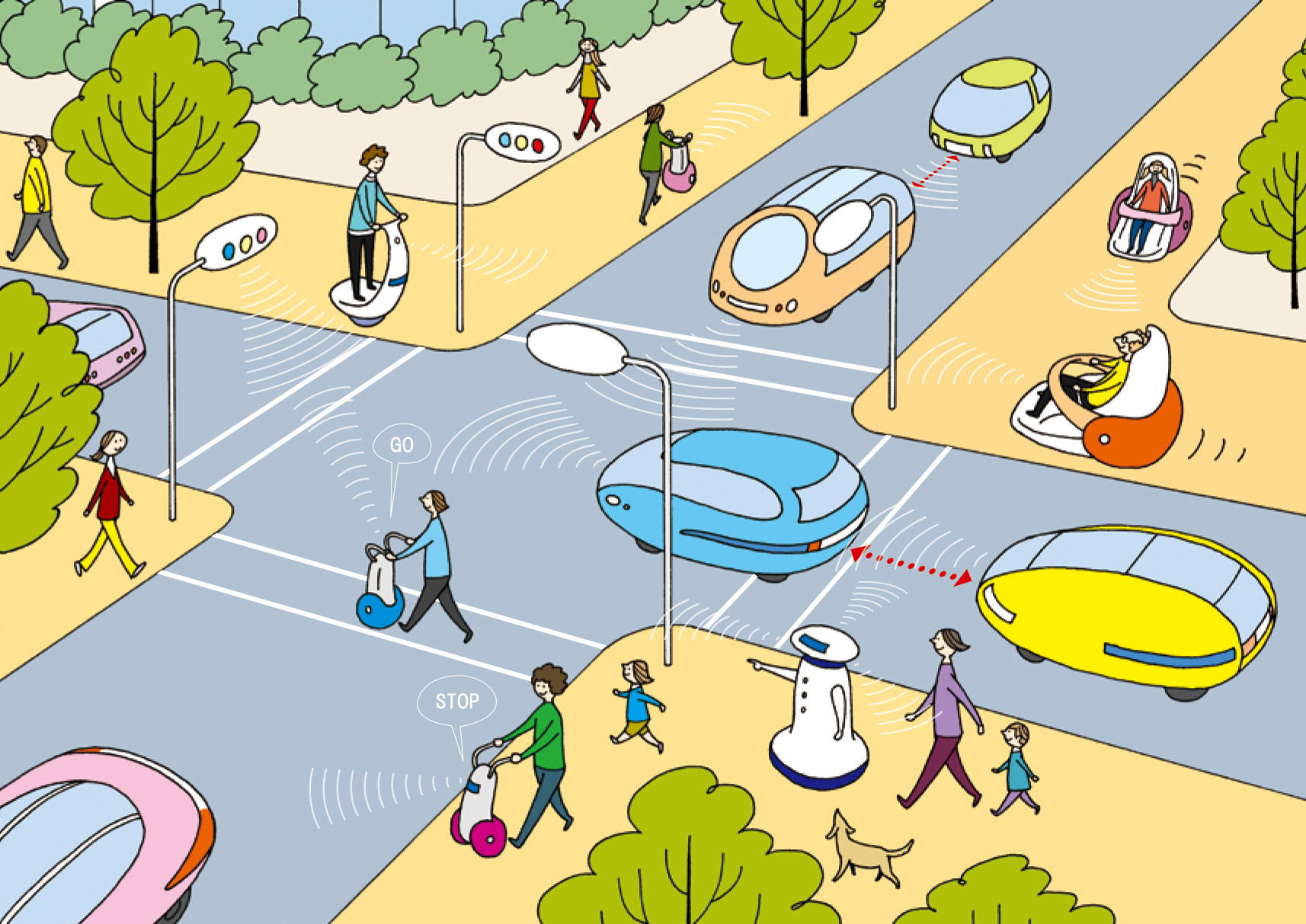
Safe and more comfortable society with control technology
Control technology finds its applications in virtually every aspect of our modern society – from daily lives to industry and to space development. If this technology advances further, it will become possible to use automobiles and guidance/transport robots, etc. more safely and comfortably as shown in this illustration.
Controlling robots’ autonomic movement
An application of model base control can be found in robots for automated guidance and transport of expendables and other articles in hospitals.
Dr. Takahashi adds, “We aim to make such guidance/transport robots autonomic to act and move around inside a hospital. Therefore, we are developing a control technology with a focus on how robots should conduct themselves in human society. The key point here is how humans will react when they encounter a robot. Some may be surprised and leave the place, while other will be interested and come closer. We are currently making improvements to the robot so that it can predict and judge the behavior the person in front of it will take and respond to the person properly, taking the past behavioral history and the current situation into account. I feel that people’s recognition of robots today is still at a low level, which is a major barrier to full introduction of robots to society. For robots to be widely accepted by society, therefore, it is important to provide people with more opportunities allowing them to see and better understand robots.”
The key to achieving this goal lies in on-site experiments and observations. In other words, we need to visit hospitals and observe, as a robot’s eyes would do, nurses carrying medical supplies and the like and how patients and visitors will look at them, as well as how patients on wheelchairs or crutches will act and move.
He continues, “We conduct experiments and observations together with many, such as representatives from robot manufacturers and students. Then all of us have a meeting to discuss the experiment and observation results. We extract characteristic elements from the behavior of nurses and people around them, which form the foundation for the development of component technologies needed. In fact, on-site studies are a rich source of discovery. For example, desk researchers tend to create advanced high-performance robots by introducing the latest in technology. However, the technology actually needed to transport goods in hospitals is not the technology needed to create fast-moving robots. On the other hand, if the robot design places too much emphasis on safety, the robot may cease moving, incapable of responding to constant changes occurring in the environment. This means that we need to develop technologies such as those enabling the robot to recognize obstacles peculiar to a place in question and evade them at a speed suitable for the place.”
Protecting buildings from earthquakes and wind, while enhancing comfort
There are types of model base control that contribute to society in relation to social infrastructure. A typical example is the control technology for quakeabsorbing base-isolated structures. Heretofore, architects assumed the magnitude of earthquakes beforehand and built structures that could withstand the assumed magnitude. Dr. Takahashi’s approach is different. He is thinking of an active quake-absorbing control based on positive utilization of the latest seismic ground motion forecast/warning system.
“I’m now proposing a quake-absorbing control system based on the utilization of information from emergency earthquake reports. If the hypocenter location of an earthquake and its magnitude can be predicted in advance, the control system can enhance the quake-absorbing performance of buildings accordingly. Just as a strongly rocking swing can be controlled simply by changing the timing of its rocking, we can effectively control quaking and realize highly safe quakeabsorption by controlling the quakeabsorbing device in a way to alleviate the structure’s shaking caused by seismic ground motion propagated from the hypocenter.”
Dr. Takahashi’s approach is based on a combination of knowledge obtained from preceding studies on the way the ground quakes (propagation routes of seismic ground motion and ground structures taken into consideration) and information available from emergency earthquake reports. This approach is attracting attention as a new method of quake-absorbing control as expansion and improvement of social infrastructure rapidly advance today.
Dr. Takahashi reveals his view saying, “This active shake control applies not only to earthquakes but also to shaking of buildings due to strong winds. I predict an ever-increasing need to control the shaking of buildings, which is interlocked with new forecast/warning systems.”

Control technologies active on various technological forefronts
Control technology can control quake-absorption of high-rise buildings, dealing with individual earthquakes based on information from emergency earthquake reports. The control technology for satellites and other spacecrafts can also be applied to terrestrial issues like shaking control of elevator ropes.
Use of satellite-controlling know how to control elevator ropes
Control technologies are also being develop ed to control a variety of equipment operating in the space environment. One example is the attitude control technology for smallsize satellites. In recent times, compact satellites are equipped with large-size, flexible and lightweight solar panels to meet their increasing power demand. If the satellite main body, heavily loaded with cameras and other equipment, changes its direction toward an observation target, that motion shakes the flexible solar panel, causing photo image distortion just as we experience with our digital camera shake.
Dr. Takahashi says, “Depending on orbit, it can take several days for a satellite to return to the position for photographing the same observation target point on the Earth. Meanwhile, there are increasing demands for photographing multiple observation points at one time – such as places suffering from serious environmental disruption and places of large-scale natural disasters. In such cases, the satellite needs to change its attitude promptly. Such attitude change involves the shaking of flexible structures like the solar panel. But it becomes possible to change the satellite attitude promptly without shaking if we apply a control technology.”
The phenomenon, in which the whole of a flexible structure shakes, is not limited to artificial satellites. Similar phenomenon can be seen in elevator ropes, for example.
“Elevator ropes are becoming longer and longer as buildings rise higher and higher, causing the problem of shaking elevator ropes. The control technology enabling rapid change in attitude of satellites without shaking can be applied to elevator ropes on the ground surface – this is a merit of the model base control technology based on mathematics and dynamics.”
Endorsed by a rich track record, “Model Base Control” technology is sure to enhance our quality of life and contribute to the betterment of society.
Interview
Listening to what Associate Professor Masaki Takahashi says
Became interested in dynamics and control engineering for the first time as a university student.
What kind of life did you live as a student?
Recalling those student days, I was totally absorbed in soccer and skiing. I took up soccer as an elementary school boy. I was enthusiastic about this sport because eleven members playing their respective roles in a team play was great fun. During my junior high school days, I captained our school team, which even won the prefectural championship. Of course there were tough experiences, but I continued to exert myself to practice daily in a strong wish to produce a good result. As such a soccer-focused school boy, it was beyond imagination that I would choose a career as a researcher in the future. While I’m now specializing in control engineering and dynamics, for me as a high school student physics was merely a subject “a bit more favorite than liberal arts-oriented subjects.” Speaking of physics, however, what caught my interest was the fact that various questions converged into one answer as I solved a problem. In other words, I was led to an answer just as an entangled string comes undone smoothly. I still remember the refreshing and delightful excitement – one you could feel when you have solved a puzzle or mystery.
Then, about when did you become interested in control engineering and dynamics?
I took an interest in these studies only after I was admitted to university. During my high school days, I couldn’t imagine that scientific formulas written in textbooks could be actually useful for society, nor could I recognize that they are necessary to understand and explain various phenomena in our lives. I should have noticed it much earlier.
Mentor’s lecture revolutionized my awareness.
You joined the System Design Engineering Department of Keio University’s Faculty of Science and Engineering, right?
Yes. To tell you the truth, I was one of the first students who were admitted to the then newly established System Design Engineering Department. There was a description on the department’s brochure: “To create systems geared to the forthcoming society, knowledge from both mechanical and electrical studies is required. As such, the department aims to foster talents capable of designing, analyzing and evaluating systems.” Without any mental resistance, I could agree to the concept of designing an overall system by combining knowledge from different fields of study. I may have been somewhat attracted to the word “Design” itself, which sounded “cool” to me.
When I was a freshman, this newly born department was not equipped with everything. But we students enjoyed the privilege of being taught by marvelous teachers who lectured us with great enthusiasm and ingenuity, which more than made up for shortage of equipment. In particular, lectures on dynamics and control engineering were so impressive that they revolutionized my awareness. My supervisor, Professor Kazuo Yoshida, was responsible for these lectures. He was kind enough to explain, in an easy-to-understand way, that mathematics and physics, which I had studied at high school, and the laws of dynamics I was then going to learn at Keio could be used as useful tools for society and were actually being applied to various business and industrial forefronts.
For example, there is a control technology to protect bridges over straits from strong winds and rain and to protect buildings against earthquakes. This technology in turn requires modeling of bridges or buildings. I still remember Prof. Yoshida explaining to us that such modeling was based on physics formulas that I had learned during my high school days, which startled me. His remark led me to become aware anew that those physics problems which I solved with a casual sense of enjoying puzzles as a high school boy were serving as the foundation of creating bridges and buildings.
Mathematics and physics – the fields where I was merely interested in solving problems – actually have much to do with our daily lives . . . it was a surprising aspect of physics. This experience motivated me to know more about physics.
Professor Yoshida’s remarks brought a drastic turnaround in your impressions about physics, right?
During his first classroom lecture, Prof. Yoshida showed us a video footage of the Tacoma Narrows Bridge in the State of Washington, U.S.A. This bridge collapsed soon after completion due to wind, strong but within the presumed velocity limit. This vivid visual record of the accident made the bridge famous. Many of you may still remember it. It was the very moment I became strongly aware of the role dynamics and control technology play.
The impressions I received at that time were so strong that, when the time came for me as a junior to decide which lab to choose from, I visited Prof. Yoshida’s lab and, after observing what was going on, decided to study under Prof. Yoshida. When giving lectures, he was usually soft spoken and did his best to explain things in an easy-to-understand way. But when it comes to research activities, he was very serious, giving sharp and pinpoint criticism and advice as necessary. Now finding myself in a position to guide students, I would like to follow Prof. Yoshida’s example. But it’s difficult and I’m striving from day to day.

Time after time I was told by Prof. Yoshida, “Always remember to visit the spot where the thing in question is taking place, and confirm what’s happening personally.” This attitude, he said, would free yourself from self-satisfied assumption, allowing you to see the reality without prejudice and grasp the essence of the problem you’re addressing. Facing a problem and grasping its essence is actually very difficult. But when I engage in research activity on the guidance/transport robot project, for example, I’m trying to conduct on-site experiments repeatedly and listen to what users and observers say. I usually visit such places not by myself but together with representatives of the equipment manufacturer and students and have a discussion meeting. This approach often brings us a variety of ripple effects – bringing to light problems unnoticed in the lab work and stimulating new requests and ideas relating to R&D, among others. To my great regret, Prof. Yoshida passed away in 2008; I can no longer listen to his valuable views. What I can do now is to do my best to approach Prof. Yoshida’s level by following his advice.
Guiding students by emphasizing interaction with the outside world.
What else do you bear in mind as a university teacher?

I’m trying to arrange so that activities of my students will not be confined to the lab but interact more and more with the outside world. In my opinion, exchanges with other universities and interaction with foreign people will prove valuable not only for their research activity here, but also for their lives even after graduation. For example, my students’ off-campus activities include participation in a space-related event held in Noshiro City in Akita Prefecture, and an event (ARLISS) in the Black Rock Desert, Nevada, U.S.A. that features the use of a rocket to launch a simulated satellite and recovering it. Another example is a student-initiated experiment class for flying PET bottle rockets as part of our Campus Festival. Though the participation in these events is not compulsory, many students are willingly participating thanks in part to support rendered by our lab’s OBs and OGs. Also, we are extending lab-wide full support to these events so that the students can concern themselves not as mere participants but play active parts as members of the event organizing body or as volunteer support staff. Though these initiatives, I would like them to experience project-based endeavors that require collaboration among participants through the whole process from design and manufacture to verification – valuable experiences rarely available from lab work that tends to be focused on PC-based simulations. The experiment class targeting elementary school children allows them to learn and experience the mechanism by which rockets can fly, as well as the phenomenon in which the distance of flight varies according to changing the angle of the rocket’s trajectory. I believe experiencing things themselves will remain as lasting impressions. When these children grow up and learn physics at high school, they may be able to develop their interest in this study if they can relate the theory to their past experience, saying “Now I understand why my rocket could fly at that time!” I would also like my lab students to realize the difficulty of teaching things to others.
Do you have any person who remains particularly outstanding in your memory?
There is a famous robot specialist in an Italian university. An encounter with this researcher was really impressive. At that time I had just obtained a doctor’s degree. But the moment he learned that my specialty was control engineering, he approached me saying, “I’d like to discuss with you since, as a specialist in information engineering, my knowledge of control engineering is limited.” His attitude was very open, which made the discussion a very beneficial opportunity for information exchange. When you have thoroughly pursued your own specialty field, you inevitably find areas of study you need to know more about. At that time I realized that we need not feel ashamed of such lack of knowledge and that it is important for us to maintain our own specialist perspectives. I would like to convey this message to my students.
Just a word from . . .
A student : Mr. Takahashi is a truly reliable teacher, patiently and attentively watching us at all times and giving appropriate advice casually but precisely when needed. What’s more, he maintains a marvelous sense of balance as he well understands our part-time jobs and job-hunting activities. During our lab’s boarding camp, he sharply criticizes our presentations, while at the same time taking the initiative in a Futsal game. He is just like a stern yet gentle older brother.
(Reporter & text writer: Kaoru Watanabe)